Sara Imari Walker, who developed Assembly Theory with chemist Lee Cronin, explains how the theory’s definition of life might help us find it on other planets
Read the full article at: www.newscientist.com
Networking the complexity community since 1999
Sara Imari Walker, who developed Assembly Theory with chemist Lee Cronin, explains how the theory’s definition of life might help us find it on other planets
Read the full article at: www.newscientist.com
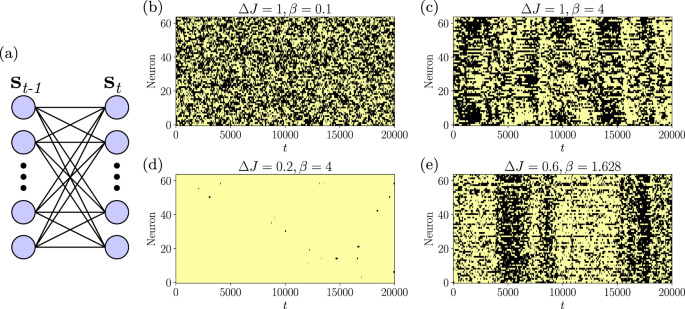
Miguel Aguilera, Masanao Igarashi & Hideaki Shimazaki
Nature Communications volume 14, Article number: 3685 (2023)
Most natural systems operate far from equilibrium, displaying time-asymmetric, irreversible dynamics characterized by a positive entropy production while exchanging energy and matter with the environment. Although stochastic thermodynamics underpins the irreversible dynamics of small systems, the nonequilibrium thermodynamics of larger, more complex systems remains unexplored. Here, we investigate the asymmetric Sherrington-Kirkpatrick model with synchronous and asynchronous updates as a prototypical example of large-scale nonequilibrium processes. Using a path integral method, we calculate a generating functional over trajectories, obtaining exact solutions of the order parameters, path entropy, and steady-state entropy production of infinitely large networks. Entropy production peaks at critical order-disorder phase transitions, but is significantly larger for quasi-deterministic disordered dynamics. Consequently, entropy production can increase under distinct scenarios, requiring multiple thermodynamic quantities to describe the system accurately. These results contribute to developing an exact analytical theory of the nonequilibrium thermodynamics of large-scale physical and biological systems and their phase transitions. The Sherrington-Kirkpatrick model is a paradigmatic model in the field of complex disordered systems such as spin glasses and neural networks. Here the authors study the stochastic thermodynamics of an asymmetric version of the model by using a path integral method and provide exact solutions for the entropy production.
Read the full article at: www.nature.com
Sebastian Stengele, David Drexel and Gemma De las Cuevas
Classical spin Hamiltonians are a powerful tool to model complex systems, characterized by a local structure given by the local Hamiltonians. One of the best understood local structures is the grammar of formal languages, which are central in computer science and linguistics, and have a natural complexity measure given by the Chomsky hierarchy. If we see classical spin Hamiltonians as languages, what grammar do the local Hamiltonians correspond to? Here, we cast classical spin Hamiltonians as formal languages, and classify them in the Chomsky hierarchy. We prove that the language of (effectively) zero-dimensional spin Hamiltonians is regular, one-dimensional spin Hamiltonians is deterministic context-free, and higher-dimensional and all-to-all spin Hamiltonians is context-sensitive. This provides a new complexity measure for classical spin Hamiltonians, which captures the hardness of recognizing spin configurations and their energies. We compare it with the computational complexity of the ground state energy problem, and find a different easy-to-hard threshold for the Ising model. We also investigate the dependence on the language of the spin Hamiltonian. Finally, we define the language of the time evolution of a spin Hamiltonian and classify it in the Chomsky hierarchy. Our work suggests that universal spin models are weaker than universal Turing machines.
Read the full article at: royalsocietypublishing.org
PLOS Complex Systems will bring together all researchers working to understand complex systems. We will partner with the community to drive Open Science practices forward to enable rapid dissemination of groundbreaking results, cross-fertilization of knowledge, and increased collaboration to address the fundamental questions that affect individuals and global societies.
More at: plos.org
David Matthews, Andrew Spielberg, Daniela Rus, Sam Kriegman, Josh Bongard
Robots are notoriously difficult to design because of complex interdependencies between their physical structure, sensory and motor layouts, and behavior. Despite this, almost every detail of every robot built to date has been manually determined by a human designer after several months or years of iterative ideation, prototyping, and testing. Inspired by evolutionary design in nature, the automated design of robots using evolutionary algorithms has been attempted for two decades, but it too remains inefficient: days of supercomputing are required to design robots in simulation that, when manufactured, exhibit desired behavior. Here we show for the first time de-novo optimization of a robot’s structure to exhibit a desired behavior, within seconds on a single consumer-grade computer, and the manufactured robot’s retention of that behavior. Unlike other gradient-based robot design methods, this algorithm does not presuppose any particular anatomical form; starting instead from a randomly-generated apodous body plan, it consistently discovers legged locomotion, the most efficient known form of terrestrial movement. If combined with automated fabrication and scaled up to more challenging tasks, this advance promises near instantaneous design, manufacture, and deployment of unique and useful machines for medical, environmental, vehicular, and space-based tasks.
Read the full article at: arxiv.org
